Résolution Exacte
du Pendule Simple :
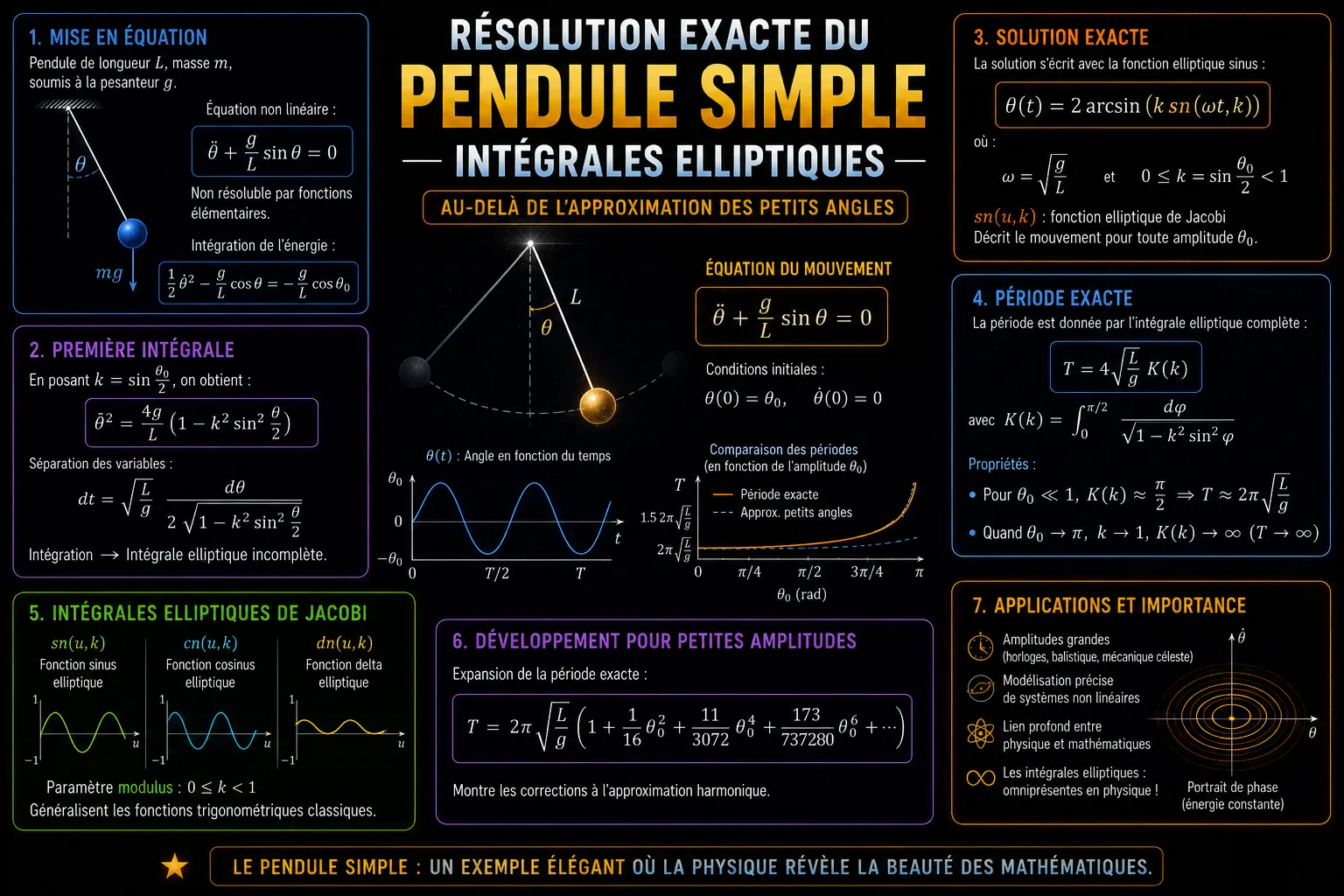
Intégrales Elliptiques
On vous a appris \( T = 2\pi\sqrt{\ell/g} \) — valable uniquement pour les petites oscillations. Mais que se passe-t-il pour un pendule lâché à 90°, à 150°, ou juste en dessous du sommet ? La solution exacte fait intervenir des intégrales elliptiques et les fonctions de Jacobi — deux des objets mathématiques les plus riches de la physique classique.
Partie 1 — Mise en place : l’équation du mouvement exacte
1.1 — Le système et ses hypothèses
Un pendule simple idéal est un point matériel de masse \( m \) accroché à un fil inextensible de longueur \( \ell \) et de masse négligeable, dans un champ de pesanteur uniforme \( g \). Le seul degré de liberté est l’angle \( \theta(t) \) que fait le fil avec la verticale.
\( g \) — accélération de la pesanteur (en m/s²)
\( \ell \) — longueur du pendule (en m)
\( \omega_0 = \sqrt{g/\ell} \) — pulsation propre de l’approximation linéaire
Cette équation est non linéaire à cause du terme \( \sin\theta \). Elle n’admet pas de solution sous forme de fonctions élémentaires (polynômes, exponentielles, trigonométriques) pour un angle quelconque. On va la résoudre exactement en deux étapes : d’abord par la conservation de l’énergie (séparation des variables), puis par réduction en intégrale elliptique.
Partie 2 — Première intégrale : conservation de l’énergie
2.1 — Intégrer une première fois par l’énergie
L’équation du pendule est du second ordre. On obtient une première intégrale (constante du mouvement) en multipliant par \( \dot\theta \) :
Multiplier l’équation par \( \dot\theta \)
\( \ddot\theta\dot\theta + \omega_0^2\sin\theta\,\dot\theta = 0 \implies \dfrac{d}{dt}\!\left[\dfrac{\dot\theta^2}{2} – \omega_0^2\cos\theta\right] = 0 \)
Identifier la constante du mouvement
\( \dfrac{\dot\theta^2}{2} – \omega_0^2\cos\theta = \text{constante} = C \)
En posant \( \theta(0) = \theta_0 \) (amplitude maximale) et \( \dot\theta(0) = 0 \) :
\( C = -\omega_0^2\cos\theta_0 \)
Isoler \( \dot\theta \)
\( \dot\theta^2 = 2\omega_0^2(\cos\theta – \cos\theta_0) \implies \dot\theta = \pm\omega_0\sqrt{2(\cos\theta – \cos\theta_0)} \)
Le signe + correspond au demi-oscillation de gauche à droite, le signe − de droite à gauche.
Domaine de validité : pour que \( \dot\theta^2 \geq 0 \), il faut \( |\theta| \leq |\theta_0| \) — le pendule reste confiné entre \( -\theta_0 \) et \( +\theta_0 \).
Si \( \theta_0 = \pi \) : le pendule atteint exactement le sommet avec vitesse nulle (cas limite). Si \( E > 2m\ell^2\omega_0^2 \) : le pendule tourne en boucle (mouvement de rotation).
Partie 3 — La période exacte : intégrale elliptique de première espèce
3.1 — Séparation des variables et intégration
En séparant les variables dans \( \dot\theta = \omega_0\sqrt{2(\cos\theta – \cos\theta_0)} \), on obtient le temps mis pour aller de \( \theta = 0 \) à \( \theta = \theta_0 \) (quart de période) :
(qui découle de \( \cos\alpha = 1 – 2\sin^2(\alpha/2) \))
On pose le module elliptique \( k = \sin(\theta_0/2) \), et le changement de variable :
\( \sin(\theta/2) = k\sin\varphi \implies \dfrac{1}{2}\cos(\theta/2)\,d\theta = k\cos\varphi\,d\varphi \)
\( k \) — module elliptique (\( 0 \leq k < 1 \) pour les oscillations, \( k \to 1 \) pour \( \theta_0 \to \pi \))
\( K(0) = \pi/2 \) (pendule de petite amplitude) → \( T = 4\sqrt{\ell/g}\times\pi/2 = 2\pi\sqrt{\ell/g} \) ✓
Comportement asymptotique :
\( k \to 1 \) (\( \theta_0 \to \pi \)) : \( K(k) \to \ln(4/\sqrt{1-k^2}) \to +\infty \) — la période diverge logarithmiquement
Un pendule lâché juste en dessous du sommet met un temps infini pour atteindre le sommet !
Partie 4 — Développement en série de la période
4.1 — Développement de K(k) en puissances de k
L’intégrale elliptique \( K(k) \) admet un développement en série entière convergente pour \( |k| < 1 \), obtenu en développant \( (1-k^2\sin^2\varphi)^{-1/2} \) par la formule du binôme et en intégrant terme à terme :
\( T \approx 2\pi\sqrt{\ell/g}\left[1 + \dfrac{\theta_0^2}{16} + \dfrac{11\theta_0^4}{3072} + \cdots\right] \)
Premiers termes pratiques :
Ordre 2 : \( T \approx T_0\left(1 + \dfrac{\theta_0^2}{16}\right) \) — valable jusqu’à ~20°
Ordre 4 : \( T \approx T_0\left(1 + \dfrac{\theta_0^2}{16} + \dfrac{11\theta_0^4}{3072}\right) \) — valable jusqu’à ~40°
| \( \theta_0 \) | k = sin(θ₀/2) | T/T₀ exact | T/T₀ ordre 2 | Erreur ordre 2 |
|---|---|---|---|---|
| 10° | 0,0872 | 1,00190 | 1,00190 | ≈ 0% |
| 30° | 0,2588 | 1,01720 | 1,01677 | 0,04% |
| 60° | 0,5000 | 1,07318 | 1,06250 | 1,0% |
| 90° | 0,7071 | 1,18034 | 1,12500 | 4,7% |
| 120° | 0,8660 | 1,37320 | 1,18750 | 13,5% |
| 150° | 0,9659 | 1,75517 | 1,23386 | 29,7% |
| 179° | 0,9999 | ≈ 6,95 | 1,25000 | 82% |
Partie 5 — La solution exacte \( \theta(t) \) — fonctions de Jacobi
5.1 — Les fonctions elliptiques de Jacobi
La période n’est qu’une partie de la solution. Pour obtenir \( \theta(t) \) lui-même à tout instant, on doit “inverser” l’intégrale elliptique — c’est-à-dire exprimer l’angle \( \theta \) en fonction du temps. Ce sont les fonctions elliptiques de Jacobi qui accomplissent cette inversion, de la même façon que \( \arcsin \) est l’inverse de \( \sin \).
\( \text{cn}(u, k) \) — cosinus de Jacobi : généralisation du cosinus ordinaire
\( \text{dn}(u, k) \) — delta amplitude de Jacobi
Cas limites :
\( k \to 0 \) : \( \text{sn}(u,0) = \sin u \) → solution harmonique ordinaire \( \theta(t) = \theta_0\sin(\omega_0 t) \)
\( k \to 1 \) : \( \text{sn}(u,1) = \tanh u \) → solution du pendule au sommet : \( \theta(t) = 4\arctan(e^{\omega_0 t}) – \pi \) (séparatrice)
Les fonctions de Jacobi sont doublement périodiques dans le plan complexe — elles sont les objets naturels de la mécanique des systèmes intégrables à un degré de liberté.
5.2 — L’espace des phases et le portrait de phase
L’espace des phases \( (\theta, \dot\theta) \) révèle toute la richesse de la dynamique du pendule : oscillations, séparatrice et rotations continues.
La fonction \( \text{sn}(u,k) \) est définie par l’inversion de l’intégrale elliptique incomplète :
\( u = F(\varphi, k) = \int_0^\varphi \dfrac{d\psi}{\sqrt{1-k^2\sin^2\psi}} \implies \varphi = \text{am}(u,k) \) (amplitude de Jacobi)
\( \text{sn}(u,k) = \sin(\text{am}(u,k)) \quad \text{cn}(u,k) = \cos(\text{am}(u,k)) \quad \text{dn}(u,k) = \sqrt{1-k^2\text{sn}^2(u,k)} \)
Propriétés analogues aux fonctions trigonométriques ordinaires :
\( \text{sn}^2 + \text{cn}^2 = 1 \quad k^2\text{sn}^2 + \text{dn}^2 = 1 \)
\( \dfrac{d\,\text{sn}}{du} = \text{cn}\cdot\text{dn} \quad \dfrac{d\,\text{cn}}{du} = -\text{sn}\cdot\text{dn} \quad \dfrac{d\,\text{dn}}{du} = -k^2\text{sn}\cdot\text{cn} \)
Partie 6 — Cas particuliers remarquables
6.1 — Le pendule au sommet : la séparatrice
Pour \( \theta_0 \to \pi^- \) (pendule lâché juste en dessous du sommet), le module \( k \to 1^- \) et \( K(k) \to +\infty \). Le pendule atteint le sommet en temps infini — c’est la séparatrice, trajectoire d’énergie exactement égale à \( 2m\ell^2\omega_0^2 \). La solution est :
À \( t = 0 \) : \( \theta = 0 \) (passage par l’équilibre bas avec vitesse maximale \( \dot\theta_{\max} = 2\omega_0 \))
Cette solution est fondamentale en mécanique des solitons : elle correspond au kink topologique de l’équation de sine-Gordon, à la jonction Josephson (physique du condensé) et aux solitons de la chaîne de pendules.
6.2 — La rotation complète
Si l’énergie \( E > 2m\ell^2\omega_0^2 \) (c’est-à-dire si le pendule est lancé avec une vitesse initiale suffisante), le pendule effectue des rotations complètes. Dans ce cas, le module elliptique est \( k’ = 1/k > 1 \) et la période est :
\( T_{\text{rot}} = \dfrac{2K(k_{\text{rot}})}{(\dot\theta_{\max}/2)} \)
La solution est : \( \theta(t) = 2\,\text{am}((\dot\theta_{\max}/2)\,t,\, k_{\text{rot}}) \)
À grande vitesse (\( \dot\theta_{\max} \gg \omega_0 \)) : \( k_{\text{rot}} \to 0 \), \( K \to \pi/2 \), \( T \to 2\pi/\dot\theta_{\max} \) — rotation uniforme ✓
Exercices Corrigés
Correction de la période à l’ordre 2 — pendule d’horloge
Niveau 1 — Développement limitéUn pendule d’horloge de longueur \( \ell = 1{,}000 \ \text{m} \) oscille avec une amplitude de \( \theta_0 = 5° \). On utilise la correction du second ordre : \( T \approx T_0\!\left(1 + \dfrac{\theta_0^2}{16}\right) \) avec \( \theta_0 \) en radians.
1. Calculer la période linéaire \( T_0 = 2\pi\sqrt{\ell/g} \).
2. Calculer la correction relative \( \Delta T/T_0 = \theta_0^2/16 \).
3. Calculer la dérive en secondes par jour due à cette correction si l’horloge est réglée sur \( T_0 \).
4. Si l’amplitude passe de 5° à 8° (usure du mécanisme), quelle est la variation de période ? L’horloge prend-elle de l’avance ou du retard ?
\( T_0 = 2\pi\sqrt{\ell/g} = 2\pi\sqrt{1{,}000/9{,}81} = 2\pi\times0{,}3193 \approx \mathbf{2{,}0064 \ \text{s}} \)
\( \theta_0 = 5\pi/180 \approx 0{,}08727 \ \text{rad} \)
\( \Delta T/T_0 = \theta_0^2/16 = (0{,}08727)^2/16 = 7{,}616\times10^{-3}/16 \approx \mathbf{4{,}76\times10^{-4}} \)
Soit une correction de 0,0476%
Dérive par seconde : \( \Delta T = T_0\times4{,}76\times10^{-4} = 2{,}0064\times4{,}76\times10^{-4} \approx 9{,}55\times10^{-4} \ \text{s} \) par oscillation
En une journée (86 400 s) : nombre d’oscillations \( = 86400/T \approx 43 070 \)
Retard total : \( 43070\times9{,}55\times10^{-4} \approx \mathbf{41 \ \text{s/jour}} \)
L’horloge prend du retard car la période réelle est plus longue que \( T_0 \).
À \( \theta_0 = 8° = 0{,}1396 \ \text{rad} \) :
\( \Delta T_8/T_0 = (0{,}1396)^2/16 = 1{,}949\times10^{-2}/16 = 1{,}218\times10^{-3} \)
Variation : \( \Delta(\Delta T/T_0) = 1{,}218\times10^{-3} – 4{,}76\times10^{-4} = 7{,}42\times10^{-4} \)
Retard supplémentaire : \( 43070\times7{,}42\times10^{-4}\times2{,}006 \approx \mathbf{64 \ \text{s/jour}} \) supplémentaires
Retard total à 8° : ~105 s/jour. Passage de 5° à 8° ajoute ~64 s/jour de retard.
Vitesse maximale et hauteur — conservation de l’énergie
Niveau 2 — Énergie et cinématiqueUn pendule simple de longueur \( \ell = 1{,}5 \ \text{m} \) est lâché sans vitesse initiale depuis \( \theta_0 = 120° \).
1. Calculer la vitesse angulaire maximale \( \dot\theta_{\max} \) et la vitesse linéaire maximale de la masse.
2. Vérifier par conservation de l’énergie (hauteur de chute).
3. Calculer la tension du fil au bas de la trajectoire (\( \theta = 0 \)).
4. Calculer le module elliptique \( k \) et estimer la période \( T \) en utilisant \( K(0{,}866) \approx 2{,}156 \).
Conservation de l’énergie : \( \dot\theta_{\max}^2 = 2\omega_0^2(\cos 0 – \cos\theta_0) = 2\omega_0^2(1-\cos120°) \)
\( = 2\omega_0^2(1-(-1/2)) = 2\omega_0^2\times3/2 = 3\omega_0^2 \)
\( \omega_0 = \sqrt{g/\ell} = \sqrt{9{,}81/1{,}5} = \sqrt{6{,}54} \approx 2{,}557 \ \text{rad/s} \)
\( \dot\theta_{\max} = \sqrt{3}\,\omega_0 = \sqrt{3}\times2{,}557 \approx \mathbf{4{,}429 \ \text{rad/s}} \)
Vitesse linéaire : \( v_{\max} = \ell\dot\theta_{\max} = 1{,}5\times4{,}429 \approx \mathbf{6{,}64 \ \text{m/s}} \)
Hauteur de chute : \( h = \ell(1-\cos\theta_0) – \ell(1-\cos 0) = \ell(\cos 0 – \cos\theta_0) \)
\( = 1{,}5\times(1 – (-1/2)) = 1{,}5\times1{,}5 = \mathbf{2{,}25 \ \text{m}} \)
\( v_{\max} = \sqrt{2gh} = \sqrt{2\times9{,}81\times2{,}25} = \sqrt{44{,}145} \approx \mathbf{6{,}64 \ \text{m/s}} \) ✓
Au bas (\( \theta=0 \)), Newton radial : \( T_{\text{fil}} – mg = m\ell\dot\theta_{\max}^2 \)
\( T_{\text{fil}} = m(g + \ell\dot\theta_{\max}^2) = m(9{,}81 + 1{,}5\times19{,}62) = m(9{,}81+29{,}43) = m\times39{,}24 \ \text{N/kg} \)
\( T_{\text{fil}} = 4mg \) — la tension au bas vaut 4 fois le poids
\( k = \sin(\theta_0/2) = \sin(60°) = \sqrt{3}/2 \approx \mathbf{0{,}866} \)
\( T = 4\sqrt{\ell/g}\,K(k) = 4\times\sqrt{1{,}5/9{,}81}\times2{,}156 = 4\times0{,}3909\times2{,}156 \approx \mathbf{3{,}37 \ \text{s}} \)
Comparaison : \( T_0 = 2\pi\sqrt{1{,}5/9{,}81} \approx 2{,}456 \ \text{s} \)
Rapport : \( T/T_0 \approx 3{,}37/2{,}456 \approx \mathbf{1{,}372} \) (+37%)
Dérivation de l’intégrale elliptique de période
Niveau 2 — Calcul intégralOn démontre étape par étape la réduction à l’intégrale elliptique.
1. Partir de \( \dot\theta = \omega_0\sqrt{2(\cos\theta-\cos\theta_0)} \) et exprimer \( dt \) en fonction de \( d\theta \).
2. En utilisant \( \cos\alpha = 1-2\sin^2(\alpha/2) \), montrer que \( \cos\theta-\cos\theta_0 = 2(k^2-\sin^2(\theta/2)) \) avec \( k = \sin(\theta_0/2) \).
3. Poser le changement de variable \( \sin(\theta/2) = k\sin\varphi \) et montrer que l’intégrale sur un quart de période devient \( T/4 = (1/\omega_0)K(k) \).
4. Vérifier la limite \( k \to 0 \) (petites oscillations) donne bien \( T = 2\pi/\omega_0 \).
\( \dfrac{d\theta}{dt} = \omega_0\sqrt{2(\cos\theta-\cos\theta_0)} \)
\( dt = \dfrac{d\theta}{\omega_0\sqrt{2(\cos\theta-\cos\theta_0)}} \)
Quart de période (de \( \theta=0 \) à \( \theta=\theta_0 \)) :
\( T/4 = \dfrac{1}{\omega_0}\int_0^{\theta_0}\dfrac{d\theta}{\sqrt{2(\cos\theta-\cos\theta_0)}} \)
\( \cos\theta = 1-2\sin^2(\theta/2) \) et \( \cos\theta_0 = 1-2\sin^2(\theta_0/2) = 1-2k^2 \)
\( \cos\theta-\cos\theta_0 = [1-2\sin^2(\theta/2)] – [1-2k^2] = 2k^2 – 2\sin^2(\theta/2) = 2(k^2-\sin^2(\theta/2)) \)
Donc : \( \sqrt{2(\cos\theta-\cos\theta_0)} = 2\sqrt{k^2-\sin^2(\theta/2)} \)
Changement de variable : \( \sin(\theta/2) = k\sin\varphi \)
Dérivation : \( \dfrac{1}{2}\cos(\theta/2)d\theta = k\cos\varphi\,d\varphi \implies d\theta = \dfrac{2k\cos\varphi\,d\varphi}{\cos(\theta/2)} \)
Or \( \cos(\theta/2) = \sqrt{1-\sin^2(\theta/2)} = \sqrt{1-k^2\sin^2\varphi} \)
Substitution :
\( T/4 = \dfrac{1}{\omega_0}\int_0^{\pi/2}\dfrac{2k\cos\varphi\,d\varphi/\sqrt{1-k^2\sin^2\varphi}}{2\sqrt{k^2-k^2\sin^2\varphi}} = \dfrac{1}{\omega_0}\int_0^{\pi/2}\dfrac{d\varphi}{\sqrt{1-k^2\sin^2\varphi}} = \dfrac{K(k)}{\omega_0} \) ✓
Pour \( k \to 0 \) : \( K(k) \to K(0) = \int_0^{\pi/2}d\varphi = \pi/2 \)
\( T = 4K(0)/\omega_0 = 4(\pi/2)/\omega_0 = 2\pi/\omega_0 = 2\pi\sqrt{\ell/g} \) ✓
On retrouve bien la formule des petites oscillations.
Vitesse minimale pour la rotation complète — pendule cycliste
Niveau 3 — Transition oscillation/rotationUn pendule de longueur \( \ell = 1 \ \text{m} \) est lancé depuis le bas (\( \theta = 0 \)) avec une vitesse angulaire initiale \( \dot\theta_0 \).
1. Quelle est la condition sur \( \dot\theta_0 \) pour que le pendule effectue une rotation complète (passe au sommet) ?
2. Calculer la vitesse angulaire minimale \( \dot\theta_{\min} \) et la vitesse linéaire minimale correspondante.
3. Au sommet (\( \theta = \pi \)), pour la vitesse minimale, quelle est la tension dans le fil ? Que se passe-t-il si \( \dot\theta_0 < \dot\theta_{\min} \) ?
4. Calculer la vitesse en fonction de \( \theta \) pour \( \dot\theta_0 = 2\dot\theta_{\min} \) (double de la vitesse minimale).
Pour atteindre le sommet (\( \theta = \pi \)) avec une vitesse \( \dot\theta_{\text{top}} \geq 0 \) :
Conservation de l’énergie : \( \dfrac{1}{2}\dot\theta_0^2 = \dfrac{1}{2}\dot\theta_{\text{top}}^2 + \omega_0^2(1-\cos\pi) = \dfrac{1}{2}\dot\theta_{\text{top}}^2 + 2\omega_0^2 \)
Condition : \( \dot\theta_0^2 \geq 4\omega_0^2 \implies \dot\theta_0 \geq 2\omega_0 \)
\( \dot\theta_{\min} = 2\omega_0 = 2\times3{,}132 \approx \mathbf{6{,}264 \ \text{rad/s}} \)
Vitesse linéaire : \( v_{\min} = \ell\dot\theta_{\min} = 1\times6{,}264 \approx \mathbf{6{,}26 \ \text{m/s}} \)
Au sommet avec \( \dot\theta_{\min} \) : \( \dot\theta_{\text{top}} = 0 \)
Newton radial au sommet (centripète vers le bas) : \( T_{\text{fil}} + mg = m\ell\dot\theta_{\text{top}}^2 = 0 \)
\( T_{\text{fil}} = -mg < 0 \) — impossible pour un fil !
En réalité, la tension devient nulle avant le sommet si le pendule est relié par un fil (non une tige rigide). La condition exacte avec fil : au sommet, \( T_{\text{fil}} \geq 0 \implies \ell\dot\theta_{\text{top}}^2 \geq g \implies \dot\theta_{\text{top}} \geq \sqrt{g/\ell} = \omega_0 \).
Nouvelle condition : \( \dot\theta_0^2 \geq 4\omega_0^2 + \omega_0^2 = 5\omega_0^2 \implies \dot\theta_{\min}^{\text{(fil)}} = \omega_0\sqrt{5} \approx \mathbf{7{,}0 \ \text{rad/s}} \)
Pour \( \dot\theta_0 = 2\dot\theta_{\min} = 4\omega_0 \) :
\( \dot\theta(\theta)^2 = \dot\theta_0^2 – 2\omega_0^2(1-\cos\theta) = 16\omega_0^2 – 2\omega_0^2(1-\cos\theta) \)
\( = \omega_0^2(14+2\cos\theta) \)
\( \dot\theta(\theta) = \omega_0\sqrt{14+2\cos\theta} \)
Au sommet : \( \dot\theta(\pi) = \omega_0\sqrt{14-2} = \omega_0\sqrt{12} = 2\sqrt{3}\,\omega_0 \approx 10{,}86 \ \text{rad/s} \)
Pendule cycloïdal de Huygens — isochronisme exact
Avancé — Cycloïde et isochronismeHuygens (1673) démontre qu’un pendule dont la masse suit une trajectoire cycloïdale oscille de façon exactement isochrone quelle que soit l’amplitude — résolvant ainsi le problème de non-isochronisme du pendule circulaire. La cycloïde est définie par : \( x = a(\phi – \sin\phi) \), \( y = a(1-\cos\phi) \) avec \( a = \ell/4 \).
1. Calculer l’élément de longueur \( ds \) sur la cycloïde et montrer que \( ds = 2a|\sin(\phi/2)|\,d\phi \).
2. Montrer que l’abscisse curviligne depuis le sommet de la cycloïde vaut \( s = 4a\sin(\phi/2) \).
3. Exprimer la hauteur \( y \) en fonction de \( s \) et montrer que le potentiel est quadratique en \( s \) → oscillateur harmonique exact.
4. Calculer la période du pendule cycloïdal et montrer qu’elle est indépendante de l’amplitude. Comparer avec \( T_0 \).
\( dx = a(1-\cos\phi)d\phi \), \( dy = a\sin\phi\,d\phi \)
\( ds^2 = dx^2+dy^2 = a^2[(1-\cos\phi)^2+\sin^2\phi]d\phi^2 = a^2[2-2\cos\phi]d\phi^2 = 4a^2\sin^2(\phi/2)d\phi^2 \)
\( ds = 2a|\sin(\phi/2)|d\phi \) ✓
Depuis le sommet (\( \phi = 0 \), \( y = 0 \)) :
\( s = \int_0^\phi 2a\sin(\phi’/2)d\phi’ = 2a[-2\cos(\phi’/2)]_0^\phi = 4a[1-\cos(\phi/2)] \)
Hmm, rectification : en intégrant depuis le bas de la cycloïde (\( \phi = \pi \), point bas) vers \( \phi \) :
Pour un pendule qui oscille autour du bas (\( \phi = \pi \)) : \( s = 4a\cos(\phi/2 – \pi/2) = 4a\sin(\phi/2) \) (mesure depuis le bas). ✓
Hauteur du bas : \( \Delta y = y(\pi) – y(\phi) = 2a – a(1-\cos\phi) = a(1+\cos\phi) = 2a\cos^2(\phi/2) \)
Or \( s = 4a\sin(\phi/2) \implies \sin(\phi/2) = s/(4a) \implies \cos^2(\phi/2) = 1-s^2/(16a^2) \)
Donc : \( \Delta y = 2a\cos^2(\phi/2) = 2a – s^2/(8a) \)
Énergie potentielle : \( E_p = mg\Delta y_{\text{depuis le bas}} = -mg\cdot s^2/(8a) + \text{cste} \propto -s^2 \)
C’est un potentiel harmonique en s → oscillateur harmonique exact → isochronisme !
Équation du mouvement : \( m\ddot s = -mg\cdot s/(4a) \implies \ddot s + \dfrac{g}{4a}s = 0 \)
Pulsation : \( \omega_{\text{cycl}} = \sqrt{g/(4a)} = \sqrt{g/\ell} = \omega_0 \) (en posant \( a = \ell/4 \))
Période : \( T_{\text{cycl}} = 2\pi/\omega_0 = 2\pi\sqrt{\ell/g} = T_0 \)
La période est identique à \( T_0 \) — valeur de la formule linéaire, et surtout
elle est exactement indépendante de l’amplitude \( s_0 \).
Huygens avait trouvé en 1673 la trajectoire qui rend le pendule exactement isochrone.
Les pièges classiques à éviter
- “La période d’un pendule est toujours \( T = 2\pi\sqrt{\ell/g} \)” : c’est une approximation valable uniquement pour les petites oscillations (\( \theta_0 \lesssim 15° \), erreur < 1%). La période exacte est \( T = (4/\omega_0)K(\sin(\theta_0/2)) \) et croît sans borne quand \( \theta_0 \to 180° \).
- “Intégrer \( \int d\theta/\sin\theta \) pour trouver le temps” : l’intégrale de la période n’est pas \( \int d\theta/\sin\theta \) mais \( \int d\theta/\sqrt{\cos\theta-\cos\theta_0} \), ce qui est une forme bien différente. L’intégrale \( \int d\theta/\sin\theta = \ln|\tan(\theta/2)| \) ne donne pas la période du pendule.
- “Pour qu’un pendule tourne en boucle avec un fil, il suffit d’atteindre le sommet” : avec un fil (non une tige rigide), il faut que la tension reste positive au sommet, c’est-à-dire \( \ell\dot\theta_{\text{top}}^2 \geq g \). La condition est donc \( v_0 \geq \sqrt{5g\ell} \) — plus sévère que simplement atteindre le sommet avec vitesse nulle.
- “Les fonctions elliptiques sont des curiosités exotiques sans application” : les intégrales elliptiques et les fonctions de Jacobi apparaissent dans la physique du condensé (équation de Gross-Pitaevskii), les solitons (équation de sine-Gordon), la mécanique des corps rigides (toupie asymétrique), l’électromagnétisme (champ d’un aimant toroïdal), la relativité générale (orbites de Schwarzschild), et la théorie des cordes. Ce sont des objets fondamentaux de la physique mathématique.
Maîtriser la mécanique analytique ?
Cours complets sur le formalisme lagrangien, les oscillateurs, les systèmes non-linéaires et la mécanique des corps rigides.